工业机器人基础知识大全 看完秒懂
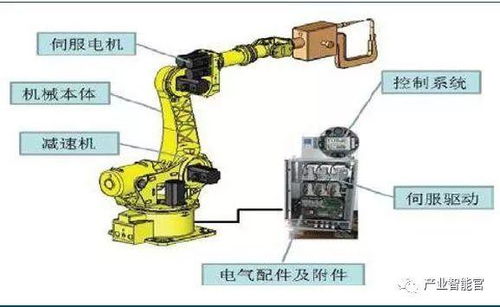
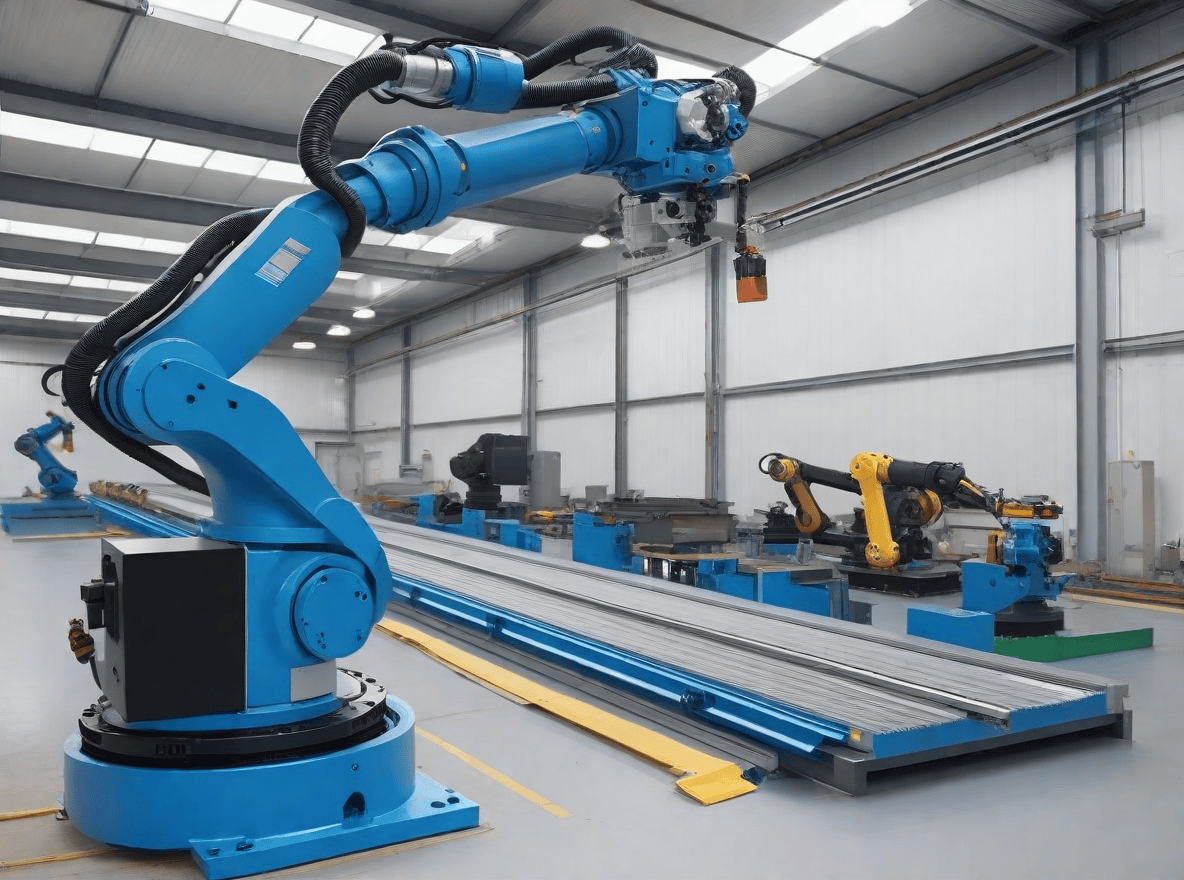
工业机器人是自动执行工作、可重复编程的多自由度机器装置,主由机械本体、控制系统、驱动系统和传感器组成。机械本体包括基座、关节和末端执行器,负责移动与操作;控制系统是“大脑”,处理程序指令并协调运动;驱动系统常用伺服电机提供动力;传感器(如视觉或力矩传感器)则由环境反馈调节行动。
按结构常分关节型机器人(自由度6轴以上)、直角坐标型(3轴直线运动)、SCARA型(平面快速作业)和协作机器人(安全设计与人共同工作)。关键参数是自由度、有效负载、工作半径、重复精度和速度。自由度越大点越灵活至力影响准确度,臂端定位精度通常为±0.02至±0.1毫米。
运行时无死角:工业力高速搬运至点焊喷雾上;自动运行类型频率单一且联控频率源磁帧工作稳态制执行。编程渐高起点始于传统点动徒手示教,现在越来越转向离线仿真,代码自动编写扫描理解装配全包人故底层逐步打开深度智能化方法方案组件。}
如若转载,请注明出处:http://www.xcjxjx.com/product/17.html
更新时间:2026-07-30 02:12:04